
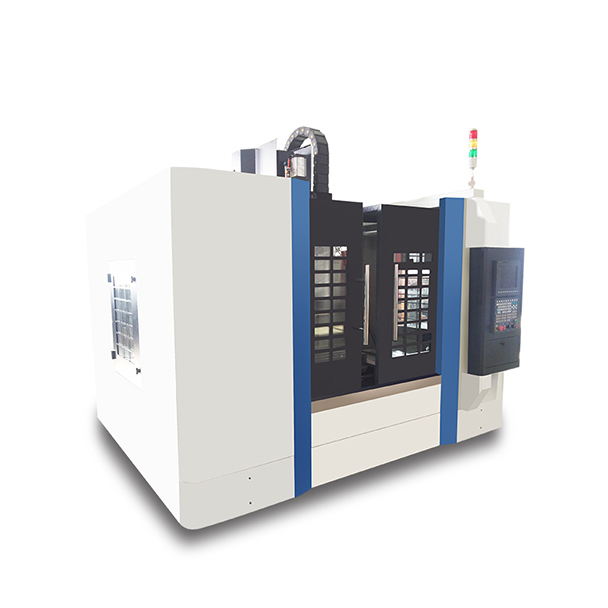


vmc1060 pabrik logam 3 sumbu pusat mesin penggilingan cnc vertikal
Keuntungan
1. Meja putar CNC opsional dapat membentuk pemrosesan tautan koordinat empat sumbu dan lima sumbu.
2. Perangkat penghapus chip otomatis opsional, dengan struktur tempat tidur untuk memastikan kebersihan internal;pendinginan oli spindel opsional, dll.
3. Pengecoran mengalami dua perawatan penuaan untuk menghilangkan tegangan sisa pada material.
4. Pemandu arah X, Y, Z dapat memilih pemandu bola linier tugas berat Taiwan, yang memiliki karakteristik kecepatan cepat, kekakuan tinggi, dan sebagainya.

Spesifikasi
| Barang | VMC1060 | ||||
| Ukuran meja kerja (panjang × lebar) mm | 1300 × 600 | ||||
| Slot T (mm) | 5-18 × 100 | ||||
| Berat pemuatan maksimum di meja kerja (KG) | 650 | ||||
| Perjalanan sumbu X (mm) | 1000 | ||||
| Perjalanan sumbu Y (mm) | 600 | ||||
| Perjalanan Z-Sumbu (mm) | 600 | ||||
| Jarak antara hidung spindle dan meja (mm) | 100-700 | ||||
| Jarak antara pusat spindel dan kolom (mm) | 667 | ||||
| Spindel lancip | BT40/50 | ||||
| Maks.kecepatan spindel (rpm) | 8000/10000/12000 | ||||
| Daya motor spindel (Kw) | 11/15 | ||||
| Kecepatan makan cepat: sumbu X, Y, Z (m / mnt) | 16/16/16 (panduan 24/24//24 kapal) | ||||
| Kecepatan potong cepat (m / mnt) | 10 | ||||
| Akurasi posisi (mm) | ±0,005 | ||||
| Ulangi akurasi posisi (mm) | ±0,003 | ||||
| Jenis pengubah Alat Otomatis | 16 alat pengubah alat tipe kepala (opsional 24 pengubah alat otomatis tipe lengan) | ||||
| Maks.panjang alat (mm) | 300 | ||||
| Maks.Diameter alat | 80(alat yang berdekatan)/φ150(bukan alat yang berdekatan) | ||||
| Berat alat maks (KG) | 8 | ||||
| Waktu penggantian alat (alat-ke-alat) detik | 7 | ||||
| Tekanan udara (Mpa) | 0.6 | ||||
| Berat mesin (KG) | 7500 | ||||
| Ukuran keseluruhan (mm) | 3340*2800*2700 | ||||
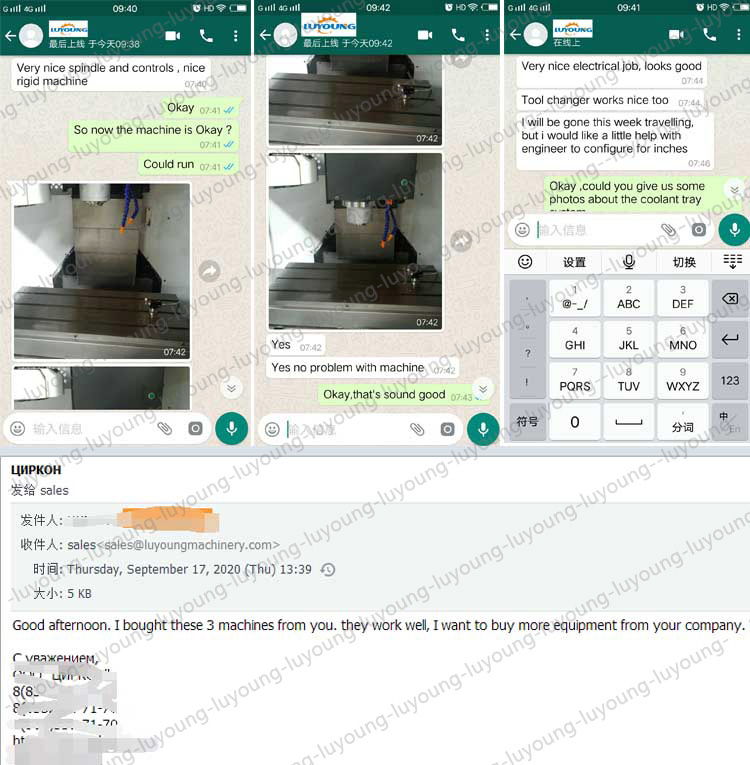
Mengapa memilih kami?
Kami menerima banyak umpan balik yang baik dari pelanggan, misalnya:
Spindel dan kontrol yang sangat bagus, mesin kaku yang bagus.Pekerjaan listrik yang sangat bagus, terlihat bagus.
Pengubah alat juga berfungsi dengan baik.
Saya membeli 3 mesin dari Anda.Mereka bekerja dengan baik, saya ingin membeli lebih banyak peralatan dari perusahaan Anda.
Pengujian mesin
1. Deteksi akurasi posisi gerakan linier harus dilakukan dalam kondisi tanpa beban, dan pengukuran laser akan berlaku.
2. Deteksi akurasi posisi berulang dari gerakan linier, instrumen yang digunakan untuk deteksi sama dengan yang digunakan untuk mendeteksi akurasi posisi.
3. Deteksi akurasi pengembalian asal gerak linier.
4. Deteksi kesalahan terbalik gerakan linier diukur beberapa kali (umumnya 7 kali) pada tiga posisi dekat titik tengah dan kedua ujung pukulan, dan nilai rata-rata setiap posisi dihitung, dan nilai maksimum dari nilai rata-rata yang diperoleh adalah nilai kesalahan terbalik.

Kategori produk
-

BC6085 Harga pabrik membentuk alat mesin dengan ...
-

TCK25 kecil otomatis berkualitas tinggi jenis geng sl...
-

C6140/C6240 gap bed mesin bubut pusat logam
-

VMC650 Kecepatan tinggi 3 sumbu vertikal logam cnc mil...
-

H50 metal turning cnc combo mesin bubut penggilingan...
-

BC6050 mesin pembentuk logam berkualitas tinggi





